GERBANG-GERBANG DASAR LOGIKA
gerbang yang diterjemahkan dari istilah asing gate, adalah elemen dasar dari semua rangkaian yang menggunakan sistem digital. Boleh jadi mereka mengenal istilah pencacah (counter), multiplekser atau encoder dan decoder dalam teknik digital, tetapi adakalanya mereka tidak tahu dari apa dan bagaimana alat-alat tersebut dibentuk. Ini dikarenakan oleh mudahnya mendapatkan fungsi tresebut dalam bentuk satu serpih IC (Integrated Circuit). Bagi yang telah mengetahui dari apa dan bagaimana suatu fungsi digital seperti halnya pencacah dibentuk hal ini tak akan menjadi masalah, namun bagi pemula dan outodidak yang terbiasa menggunakan serpih IC berdasarkan penggunaannya akan memiliki pendapat yang salah mengenai teknik digital. Untuk istilah artikel berikut ditujukan bagi pemula.
Semua fungsi digital pada dasarnya tersusun atas gabungan beberapa gerbang logika dasar yang disusun berdasarkan fungsi yang diinginkan. Gerbang-gerbang dasar ini bekerja atas dasar logika tegangan yang digunakan dalam teknik digital. Logika tegangan adalah asas dasar bagi gerbang-gerbang logika. Dalam teknik digital apa yang dinamakan logika tegangan adalah dua kondisi tegangan yang saling berlawanan. Kondisi tegangan “ada tegangan” mempunyai istilah lain “berlogika satu” (1) atau “berlogika tinggi” (high), sedangkan “tidak ada tegangan” memiliki istilah lain “berlogika nol” (0) atau “berlogika rendah” (low).
Agar lebih jelas, lihat Gambar 1, ilustrasi ini menggambarkan sebuah sumber tegangan, sebuah saklar, dan sebuah lampu. Logika satu dapat disamakan dengan menutup saklar sehingga “ada tegangan” yang diberikan pada lampu sehingga lampu menyala, sebaliknya logika nol dapat dianalogikan dengan membuka saklar sehingga “tak ada tegangan” yang diberikan pada lampusehingga lampu padam. Disini lampu mewakili logika- logika tersebut. Lampu menyala berarti logika satu dan lampu mati menunjukkan logika nol.

Gambar 1
Bagi para pemula, sedikit penjelasan diatas tak akan memberikan gambaran apa-apa tentang bagaimana suatu rangkaian berbasis logika digital dirancang. Penggunaan logika tegangan pada gerbang-gerbang dasar yang akan dibahas berikut mungkin akan memberikan jawaban yang cukup memuaskan.
Gerbang Not (Gerbang Pembalik)
Gerbang NOT atau juga bisa disebut dengan pembalik (inverter) memiliki fungsi membalik logika tegangan input nya pada outputnya. Membalik dalam hal ini adalah mengubah menjadi lawannya. Karena dalam logika tegangan hanya ada dua kondisi yaitu tinggi dan rendah atau satu dan nol, maka membalik logika tegangan berarti mengubah satu menjadi nol atau sebaliknya mengubah nol menjadi satu. Gambar 2 adalah ilustrasi dari gerbang NOT yang mungkin dapat memperjelas cara kerjanya.

Gambar 2 Ilustrasi Sebuah Gerbang NOT
Keadaan awal dari rangkaian tersebut adalah: saklar 1 terbuka dan saklar 2 tertutup yang berarti lampu menyala. Yang perlu dicatat disini adalah relay yang dipakai normal on, artinya dalam keadaan tak bekerja relay menyebaban saklar 2 menutup, sebaliknya bila ia bekerja saklar 2 justru terbuka. Saklar 1 dianggap sebagai input gerbang sedangkan lampu sebagai outputnya. Bila saklar 1 ditutup (input berlogika satu), tegangan akan masuk ke relay dan menyebabkan bekerja membuka saklar 2, yang berarti memadamkan lampu (output berlogika nol).Sebaliknya bila saklar 1 dibuka (input berlogika nol), relay menjadi tak bekerja sehingga saklar kembali menutup dan menyalakan lampu (output berlogika satu). Tabel 1 mengiktisarkan kerja rangkaian tersebut.

Tabel 1
Dalam prakteknya gerbang NOT disimbolkan dalam bentuk seperti yang dapat dilihat dalam Gambar 3.

Gambar 3 Simbol Gerbang NOT
Bila inputnya diberi tegangan dengan nilai “tertentu” (logika satu), outputnya justru akan memiliki tegangan yang bernilai nol (logika nol). Sebaliknya bila inputnya diberi tegangan nol (logika nol) outputnya akan memiliki harga tegangan “tertentu” (logika 1). Untuk mempermudah penjelasan anggap nilai tegangan “tertentu” adalah 5 V, walaupun dalam prakteknya tidaklah harus demikian.
Dalam sistem digital, setiap fungsi logika memiliki apa yang disebut tabel kebenaran. Tabel ini akan memberikan gambaran yang jelas mengenai hubungan antara input dan output dari suatu rangkaian logika digital. Tabel 2 menunjukkan tabel kebenaran untuk gerbang NOT.

Tabel 2 Kebenaran Gerbang NOT
Yang perlu diperhatikan adalah: angka satu pada input menunjukkan ada tegangan sebesar 5 V yang diberikan, angka nol menunjukkan tegangan yang diberikan pada input adalah sebesar 0 V. Angka satu pada output menunjukkan ada tegangan sebesar 5 V yang keluar darinya, angka nol menunjukkan ada tegangan yang dikeluarkan pada output adalah 0 V. Dari tabel kebenaran dapat dilihat bahwa logika output selalu berkebalikan dari inputnya, hal ini menerangkan mengapa gerbang ini disebut juga dengan pembalik.
Gerbang OR (Gerbang Penjumlah)
Gerbang OR berbeda dengan gerbang NOT yang hanya memiliki satu input, gerbang ini memiliki paling sedikit 2 jalur input. Artinya inputnya bisa lebih dari dua, misalnya empat atau delapan. Yang jelas adalah semua gerbang logika selalu mempunyai hanya satu output. Ilustrasi dari gerbang OR bisa dilihat dalam Gambar 4.

Gambar 4 Ilustrasi Sebuah Gerbang OR
Disini input untuk rangkaian adalah saklar 1 dan 2, bila rangkaian 1 ditutup (Input 1 berlogika satu) dan saklar 2 terbuka (input 2 berlogika nol) maka lampu akan menyala (output berlogika satu). Demikian pula bila saklar 1 dibuka (input 1 berlogika nol) dan saklar 2 ditutup (input 2 berlogika 1) lampu akan tetap menyala (output berlogika satu). Bila kedua saklar dibuka (kedua input berlogika nol) lampu akan padam (output berlogika nol). Iktisar dari cara kerja ini dapat dilihat pada tabel 3.

Tabel 3
Sedangkan Gambar 5 menunjukkan simbol dari gerbang OR yang tabel kebenarannya ditunjukkan oleh tabel 4.

Ciri khas dari gerbang ini adalah outputnya akan berlogika nol hanya bila kedua inputnya berlogika nol pula. Dari tabel kebenaran dapat dilihat bahwa outputnya merupakan fungsi penjumlahan dari kedua inputnya dari sini bisa disimpulka n bahwa gerbang OR adalah suatu gerbang penjumlah, namun perlu diperhatikan bahwa hasil penjumlahan logika tak akan melebihi nilai satu.
Gerbang AND (Gerbang Pengali)
Sama dengan gerbang OR, gerbang AND minimal memiliki 2 input. Ilustrasi gerbang AND dapat dilihat pada Gambar 6.

Sama dengan gerbang OR, gerbang AND minimal memiliki 2 input. Ilustrasi gerbang AND dapat dilihat pada Gambar 6.

Gambar 6 Ilustrasi Sebuah Gerbang AND
Berbeda dengan ilustrasi untuk gerbang OR, disini saklar dipasang secara seri sehingga lampu akan menyala (output berlogika satu) hanya jika kedua saklar ditutup (kedua input berlogika satu). Untuk kombinasi penutupan saklar yang lain, lampu akan tetap padam (output berlogika nol). Simbol gerbang AND dapat dilihat dalam Gambar 7. dan tabel kebenarannya ditunjukkan oleh tabel 5. Dari tabel ini bisa dilihat bahwa output akan berlogika satu hanya bila kedua inputnya berlogika satu. Dari sini dapat disimpulkan bahwa gerbang AND memiliki fungsi mengalikan logika dari kedua inputnya.

Gerbang NOR (Not OR)
Gerbang NOR adalah pengembangan dari gerbang OR. Pengembangan ini berupa pemasangan gerbang NOT pada output dari gerbang OR. Gambar 8 menunjukkan gabungan ini beserta simbol dari gerbang NOR. Karena pada dasarnya gerbang OR yang outputnya dibalik maka tabel kebenarannya adalah kebalikan dari tabel kebenaran gerbang OR. (lihat Tabel 6)
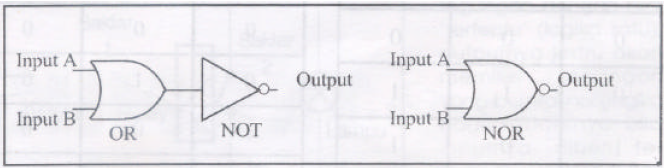
Gambar 8 Simbol Gerbang NOR

Tabel 6 Tabel Kebenaran Gerbang NOR
Gerbang NAND (NOT And)
Gerbang NAND adalah pengembangan dari gerbang AND. Gerbang ini sebenarnya adalah gerbang AND yang pada outputnya dipasang gerbang NOT. Untuk lebih jelasnya lihat Gambar 9 yang menunjukkan penggabungan yang dilakukan dan simbol dari NAND. Tabel kebenaran dari gerbang NAND yang merupakan kebalikan dari gerbang AND dapat dilihat dalam tabel 7.
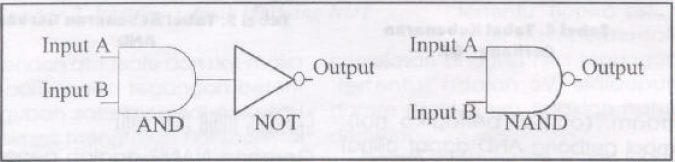
Ganbar 9 Simbol Gerbang NAND

Tabel 7 Tabel Kebenaran Gerbang NAND
Rangkaian Terpadu (IC) Untuk Gerbang -Gerbang Dasar
Setelah mengenal gerbang-gerbang dasar yang digunakan dalam teknik digital, bagi para pemula mengkin saja timbul pertanyaan dimana gerbang-gerbang ini dapat diperoleh?
Jawabannya mudah sekali, karena gerbang- gerbang ini telah dijual secara luas dipasaran dalam IC tunggal (single chip). Yang perlu diperhatikan sekarang adalah dari jenis apa dan bagaimana penggunaan dari kaki-kaki IC yang telah didapat. Sebenarnya informasi dari IC-IC yang ada dapat dengan mudah ditemukan dalam buku data sheet IC yang sekarang ini banyak dijual. Namun sedikit contoh berikut mungkin akan me mpermudah pencarian.
Berikut adalah keterangan mengenai IC-IC yang mengandung gerbang-gerbang logika dasar yang dengan mudah dapat dijumpai dipasaran.
Catatan:
· Ada dua golongan besar IC yang umum digunakan yaitu TTL dan CMOS.
· IC dari jenis TTL memiliki mutu yang relatif lebih baik daripada CMOS dalam hal daya yang dibutuhkan dan kekebalannya akan desah.
· IC TTL membutuhkan catu tegangan sebesar 5 V sedangkan CMOS dapat diberi catu tegangan mulai 8 V sampai 15 V. Hali ini harus diingat benar-benar karena kesalahan pemberian catu akan merusakkan IC.
· Karena adanya perbedaan tegangan catu maka tingkat tegangan logika juga akan berbeda. Untuk TTL logika satu diwakili oleh tegangan sebesar maksimal 5 V sedangkan untuk CMOS diwakili oleh tegangan yang maksimalnya sebesar catu yang diberikan, bila catu yang diberikan adalah 15 V maka logika satu akan diwakili oleh tegangan maksimal sebesar 15 V. Logika pada TTL dan CMOS adalah suatu tegangan yang harganya mendekati nol.
· Untuk TTL nama IC yang biasanya terdiri atas susunan angka dimulai dengan angka 74 atau 54
sedangkan untuk CMOS angka ini diawali dengan 40.
Contoh: IC 7401 adalah dari jenis TTL sedangkan 4017 adalah dari jenis CMOS.